.svg)
AI 솔루션 문의하기




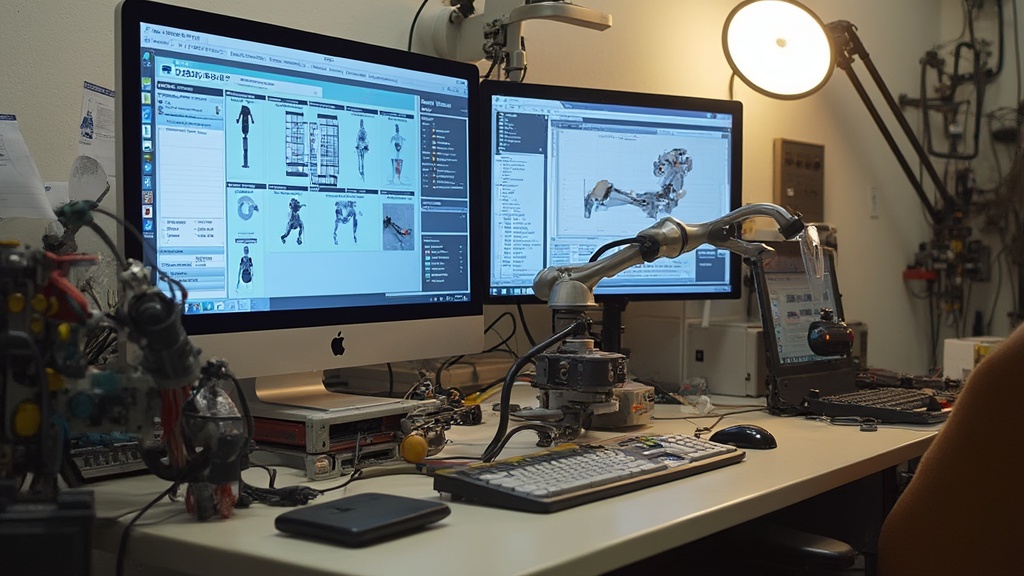
Teleoperation 기술은 인간의 동작을 실시간으로 로봇에 전달해 복잡한 작업을 수행하면서 다양한 환경의 상황별 데이터를 수집하는 혁신적인 방법입니다. 단방향 통신으로 인간의 명령만 로봇에 전달하는 유니레터럴 방식이 간단한 작업에 적합하고, 양방향 통신으로 로봇의 피드백을 제공하는 바이레터럴 방식이 복잡한 환경에서 더 직관적이고 정밀한 조작을 가능하게 하는 것이 두 방식의 핵심 차이입니다.
Echo 시스템이 저비용 오픈소스 환경과 힘 피드백 기능으로 정교하고 정확한 데이터 수집을 지원하는 대표적인 Teleoperation 플랫폼입니다. 제조업의 로봇팔 정밀 부품 조립과 의료 분야의 원격 수술 로봇이 Teleoperation 기술의 성공적인 산업 적용 사례이며, 이는 다양한 환경에서 인간과 유사한 상호작용을 통해 로봇의 자율성을 높이는 기술적 가치를 입증합니다.


Teleoperation 기반 로봇 데이터 구축은 계획·실행·분석의 3단계로 진행됩니다. 계획 단계에서 데이터 수집 목표 설정·하드웨어 준비·소프트웨어 환경 설정을 완료하는 것이 전체 프로세스의 방향을 결정하며, 실행 단계에서 계획된 시나리오에 따라 로봇을 원격 조작하고 센서를 통해 움직임과 환경 상호작용 데이터를 수집합니다. 바이레터럴 방식의 경우 실시간 피드백을 통한 조작 조정이 실행 단계의 핵심 강점입니다.
분석 단계에서 수집된 데이터의 정확성과 일관성을 검토하고, 가우시안 노이즈 추가와 이미지 증강 기법으로 데이터 다양성을 높이며, 로봇 학습에 필요한 인사이트를 도출하는 것이 데이터 품질 보증의 완성 과정입니다.
계획 단계의 목표·장비·소프트웨어 준비 완비, 실행 단계의 데이터 정확성과 일관성 확보, 분석 단계의 품질 검토와 증강 기법 적용이 유기적으로 연결될 때 고품질 로봇 학습 데이터가 완성됩니다.
Teleoperation 기반 데이터가 인간의 동작을 정밀하게 모방해 다양한 시나리오에서 로봇이 자율적으로 학습할 수 있도록 지원하는 것이 이 방식으로 수집된 데이터의 핵심 가치입니다. 가우시안 노이즈 추가가 모델이 노이즈에 강인한 학습을 수행하도록 돕고, 이미지 데이터의 회전·반전·색상 변화가 훈련 데이터를 확장해 모델의 일반화 능력을 향상시키는 것이 두 가지 핵심 증강 기법의 역할입니다.
증강된 데이터가 모델이 예상치 못한 상황에서도 안정적인 성능을 발휘하도록 해 로봇의 신뢰성을 크게 향상시키는 것이 데이터 증강의 핵심 목적입니다. Echo 시스템 기반의 체계적인 3단계 프로세스와 가우시안 노이즈·이미지 증강 기법을 통합적으로 실행하는 조직이 다양한 실세계 환경에 효과적으로 대응하는 고품질 로봇 학습 데이터 구축의 경쟁력을 확보할 것입니다.




.svg)
.svg)


