.svg)
AI 솔루션 문의하기




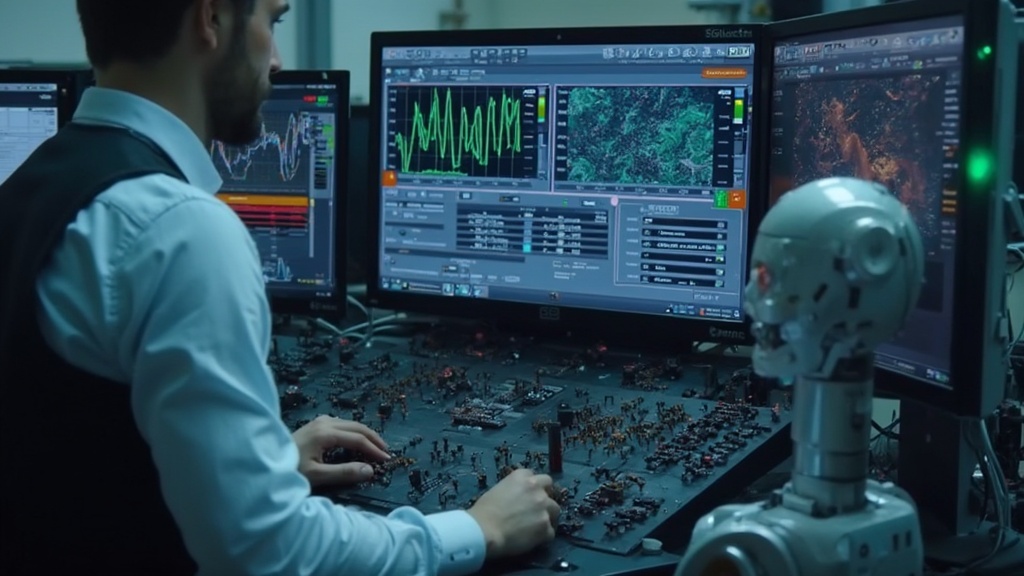
로봇이 현실의 다양한 환경에서 작업을 수행하려면, 그 환경에 적응할 수 있는 데이터가 필요합니다. 가상 환경(시뮬레이션)에서만 학습한 로봇은 실제 환경의 예측 불가능한 변수들(조명 변화, 표면의 질감, 예상치 못한 장애물)에 대응하기 어렵습니다. 원격조작 기반 로봇 데이터 수집은 인간 조작자가 실제 환경에서 로봇을 조종하면서 그 과정을 기록하는 방식입니다. 조작자의 손 움직임, 시각 정보 처리, 의사결정 방식이 모두 데이터로 기록되어 로봇 학습의 토대가 됩니다.
이 방식은 시뮬레이션보다 훨씬 현실적인 데이터를 제공하며, 로봇의 일반화 능력을 크게 높입니다. 다양한 조작자가 참여하면 더욱 다양한 해결 방식이 기록되어 로봇의 학습 데이터 품질이 향상됩니다. 원격조작 기반 데이터 수집으로 로봇이 실제 환경의 복잡성을 학습할 수 있을 것으로 예상됩니다.
원격조작 로봇 시스템은 조작자와 로봇 사이의 양방향 정보 전달에 의존합니다. 조작자가 로봇의 상태를 정확히 인지하고, 로봇이 조작자의 의도를 신속하게 실행할 수 있을 때 효과적인 데이터 수집이 이루어질 수 있을 것으로 기대됩니다.
원격조작 로봇 데이터 수집은 다양한 환경에서 이루어집니다. 실내 환경의 물건 조작(책상 위의 작은 물체 집기, 서랍 열고 닫기), 실외 환경의 작업(물체 옮기기, 기계 부품 조작), 위험한 환경의 작업(화학물질 취급, 방사능 지역 탐색) 등이 데이터 수집 대상입니다. 실제 환경의 변수(습도, 온도, 조명, 표면 마찰)가 모두 데이터에 반영되므로, 로봇이 학습하는 데이터의 현실성이 높습니다.

같은 작업이라도 환경이 다르면 로봇의 행동 방식이 달라져야 하는데, 다양한 환경에서 수집된 데이터가 이를 가능하게 합니다. 계절 변화, 시간대별 조명 변화 등도 의도적으로 포함시켜 데이터의 대표성을 높입니다. 다양한 환경에서 수집된 데이터로 로봇이 새로운 상황에 더 잘 적응할 수 있을 것으로 예상됩니다.

원격조작 로봇 데이터의 품질은 조작자의 숙련도에 크게 좌우됩니다. 숙련된 조작자는 효율적인 경로를 선택하고, 불필요한 움직임을 최소화하며, 예상되는 문제에 미리 대응합니다. 반면 미숙한 조작자는 비효율적인 움직임, 실패와 재시도를 많이 기록합니다. 로봇 학습 관점에서는 성공 사례뿐 아니라 실패 사례와 재시도 과정도 중요한 데이터입니다. 따라서 데이터 수집 프로젝트는 다양한 수준의 조작자를 포함하여 진행됩니다. 전문가 조작자의 효율적 경로, 초보 조작자의 시행착오 과정, 재훈련받은 조작자의 학습 과정 모두가 데이터로 기록됩니다. 데이터 수집 후 품질 검증 단계에서 이상 데이터(오류 조작, 기술 오류)는 제거하거나 라벨링합니다. 조작자의 다양한 수준과 접근 방식의 데이터 수집으로 로봇 학습의 포괄성을 높일 수 있을 것으로 기대됩니다.

원격조작으로 수집된 영상과 센서 데이터에는 의미 있는 라벨이 붙어야 합니다. 예를 들어 "물체 집기", "물체 놓기", "경로 계획", "장애물 회피" 같은 작업 단위의 라벨이 필요합니다. 전통적으로는 인간 라벨러가 수동으로 이 작업을 수행했으나, 대규모 데이터의 경우 비용과 시간이 매우 많이 소요됩니다. 최근에는 자동 라벨링 알고리즘이 개발되어, 조작자의 움직임 패턴을 분석하여 자동으로 작업 단위를 인식하고 라벨링합니다. 다만 자동 라벨링의 정확도가 100%가 아니므로, 샘플링을 통해 일부 데이터는 인간이 검증합니다. 이렇게 자동화와 수동 검증을 결합하면 라벨링 비용을 크게 절감할 수 있습니다. 자동 라벨링 기술의 발전으로 대규모 원격조작 데이터의 처리가 경제적으로 가능해질 것으로 예상됩니다.

원격조작 로봇 시스템에서 가장 중요한 기술적 과제는 지연시간(Latency) 제어입니다. 조작자가 명령을 내렸을 때 로봇이 그 명령을 실행하는 데 걸리는 시간이 길면, 조작자는 정확한 제어가 불가능합니다. 일반적으로 50밀리초 이하의 지연시간이 필요한 것으로 알려져 있습니다. 지연시간을 줄이려면 고속 네트워크(5G, 광대역), 로봇의 빠른 반응 속도, 영상 압축 기술 등이 필요합니다. 지연시간이 크면 조작자가 과도한 입력을 하거나, 오조작으로 인한 실패를 반복합니다. 이렇게 기술적 제약으로 인한 오류 데이터가 수집되면, 로봇이 잘못된 패턴을 학습할 수 있습니다.
따라서 데이터 수집 환경의 네트워크 성능, 지연시간을 명확히 기록하고, 필요시 지연시간이 높은 데이터는 제거합니다. 원격조작 시스템의 기술적 성능이 수집 데이터의 신뢰도를 결정하는 중요한 요소가 될 것입니다.
원격조작으로 수집된 데이터는 "행동 모방 학습(Imitation Learning)" 또는 "학습 from demonstration"의 토대가 됩니다. 로봇이 조작자의 행동을 직접 관찰하고 그것을 모방하도록 학습합니다. 이 과정에서 로봇은 조작자가 선택한 경로, 속도, 힘의 크기 등을 학습합니다. 데이터의 다양성과 품질이 높을수록 로봇의 학습 성과도 좋습니다. 일반적으로 수백 시간에서 수천 시간의 원격조작 영상이 수집됩니다. 이렇게 대규모로 수집된 데이터는 단일 로봇 모델뿐 아니라 여러 로봇 모델에 공통으로 사용될 수 있어 데이터의 활용 가치가 높습니다.
데이터셋이 공개되면 다양한 연구팀이 이를 이용하여 로봇 학습 알고리즘을 개선할 수 있습니다. 원격조작 기반의 대규모 데이터 수집으로 로봇 학습 분야의 발전을 가속화할 수 있을 것으로 기대됩니다.




.svg)
.svg)


