.svg)
AI 솔루션 문의하기




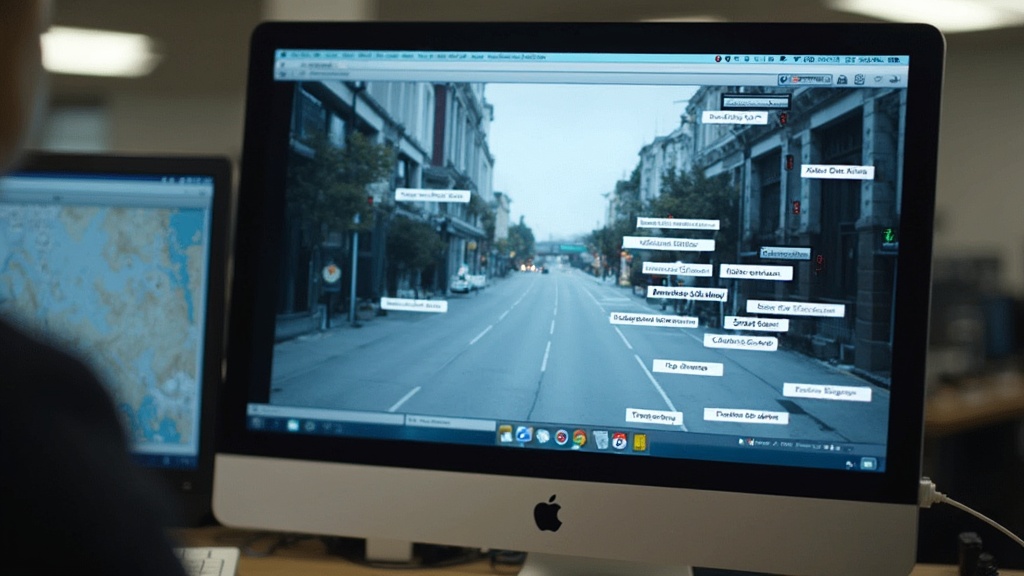
자율주행 시스템은 카메라·라이다·레이더 등 다양한 센서를 통해 주변 환경을 인식하고 이를 바탕으로 판단과 제어를 수행합니다. 이 인식 단계를 담당하는 AI 모델이 올바르게 동작하려면 충분한 양의 정확하게 표시된 학습 데이터가 필요합니다. 영상 데이터 라벨링은 카메라가 촬영한 도로 영상에서 차량·보행자·표지판·차선·신호등 등 모든 객체에 의미 있는 정보를 표시하는 작업으로 자율주행 AI 모델의 정확도는 이 라벨링 데이터의 품질에 직접적인 영향을 받습니다. 수백만 장 이상의 프레임 단위 영상 데이터에 라벨을 붙이는 작업이 요구되기 때문에 라벨링 방법의 선택과 운영 방식이 모델 개발 전체의 효율성을 좌우합니다.
바운딩 박스는 객체 주위에 직사각형 상자를 그리고 해당 객체의 클래스를 지정하는 방식으로 자율주행 라벨링에서 가장 기본이 되는 방법입니다. 차량·보행자·이륜차·신호등·표지판 등 개별 객체를 빠르게 라벨링할 수 있어 대규모 데이터셋 구축 초기 단계에서 많이 활용됩니다. 작업 속도가 빠르고 라벨러 교육이 상대적으로 쉽다는 장점이 있지만 정사각형 또는 직사각형 형태로만 객체를 표현하기 때문에 불규칙한 모양의 객체나 서로 겹친 객체를 정밀하게 구분하는 데는 한계가 있습니다. 자율주행 영상 데이터에서 바운딩 박스는 객체 탐지 모델의 기초 학습 데이터로 활용되며 클래스 레이블과 함께 이동 방향이나 가시성 여부 등 속성 정보를 추가로 부여하는 방식으로 정보 밀도를 높이기도 합니다.

차선과 도로 경계처럼 선형으로 이루어진 객체는 바운딩 박스보다 폴리라인 방식이 더 적합합니다. 폴리라인은 여러 점을 이어 선으로 표현하는 방식으로 자율주행에서 차선 감지와 경로 계획 학습 데이터를 만드는 데 사용됩니다.
폴리라인과 폴리곤 방식은 작업 시간이 길고 라벨러의 숙련도가 요구되지만 객체의 실제 형태에 가깝게 표현할 수 있어 복잡한 도로 환경에서의 인식 정확도를 높이는 데 기여합니다.

세그멘테이션은 영상의 모든 픽셀에 클래스 레이블을 부여하는 방식으로 자율주행 AI 모델이 장면 전체를 이해할 수 있도록 돕습니다. 시맨틱 세그멘테이션은 도로·하늘·건물·보행자 등 클래스 단위로 픽셀을 분류하며 같은 클래스에 속하는 객체를 개별적으로 구분하지는 않습니다. 인스턴스 세그멘테이션은 이보다 더 세밀하게 같은 클래스 내 개별 객체도 서로 구분하여 표시합니다. 자율주행 시스템이 복잡한 도심 환경에서 여러 보행자가 겹쳐 있거나 차량이 밀집해 있는 상황을 인식하려면 인스턴스 세그멘테이션 수준의 라벨 데이터가 필요하며 이는 작업 난이도와 소요 시간이 높아지는 대신 더 정밀한 모델 학습을 가능하게 합니다.

카메라 영상 기반 2D 라벨링만으로는 객체의 깊이 정보와 3차원 위치를 정확하게 파악하는 데 한계가 있습니다. 자율주행 차량이 주변 물체를 정밀하게 감지하고 추적하려면 라이다 센서 데이터에 대한 3D 라벨링이 함께 이루어져야 합니다.
3D 라벨링 작업은 일반 이미지 어노테이션보다 전문성이 요구되며 전용 라벨링 도구 없이는 처리하기 어렵기 때문에 도구 선택과 작업자 교육이 데이터 품질을 결정하는 중요한 변수가 됩니다.
자율주행 AI 모델은 정지 이미지만이 아니라 시간 흐름에 따른 객체의 움직임도 학습해야 합니다. 비디오 데이터에서 초당 30프레임이면 1분 영상이 1,800개의 이미지로 분해되며 이 모든 프레임에 일관성 있는 라벨을 부여하는 것이 비디오 시퀀스 라벨링의 핵심 과제입니다. 동일한 객체가 여러 프레임에 걸쳐 이동하더라도 동일한 식별자와 클래스가 유지되어야 모델이 객체의 궤적을 학습할 수 있습니다. 객체 추적 라벨링에서는 차량이나 보행자가 화면 밖으로 나갔다가 다시 등장하거나 다른 객체에 가려지는 상황도 처리해야 하며 이 과정의 일관성이 확보되지 않으면 모델이 추적 오류를 그대로 학습하게 됩니다.

대규모 자율주행 학습 데이터는 수백만 프레임 이상에 달하기 때문에 사람이 모든 라벨링을 수작업으로 처리하기에는 시간과 비용이 지나치게 큽니다. 이를 보완하는 방법으로 오토 라벨링이 활용됩니다. 오토 라벨링은 사전 훈련된 모델이 데이터에 자동으로 레이블을 생성하고 사람 작업자가 오류를 수정하는 방식으로 진행됩니다. 정확하게 라벨링된 데이터로 초기 모델을 학습시킨 뒤 해당 모델이 새 데이터에 자동으로 레이블을 예측하고 낮은 신뢰도 구간의 결과만 사람이 검수하는 구조입니다. 오토 라벨링은 작업 속도를 크게 높이지만 초기 모델의 편향이 자동 생성 라벨에 그대로 반영될 수 있어 정기적인 품질 검증과 보정 작업을 병행하지 않으면 오류가 누적될 위험이 있습니다.
자율주행 AI 모델의 성능은 학습 데이터의 정확도에 직결되기 때문에 라벨링 품질 관리는 데이터 파이프라인에서 별도의 단계로 반드시 갖추어야 합니다. 동일한 데이터를 여러 작업자가 독립적으로 라벨링한 뒤 결과를 교차 검증하는 방식이 일반적으로 활용됩니다. 자율주행 특성상 야간·악천후·역광 등 어려운 조건에서의 라벨링 기준과 객체가 부분적으로 가려진 경우의 처리 규칙을 사전에 명확히 정의한 가이드라인이 필요합니다. 라벨링 가이드라인이 모호하거나 작업자마다 다르게 해석되면 같은 장면에 대해 서로 다른 레이블이 붙게 되고 이는 모델 학습 과정에서 일관성 없는 패턴으로 나타나 최종 인식 성능을 저하시킵니다.
현재 자율주행 시스템은 카메라만으로는 충분한 인식 성능을 확보하기 어렵기 때문에 카메라·라이다·레이더 데이터를 통합하여 처리하는 센서 융합 방식을 활용합니다. 센서 융합 라벨링에서는 서로 다른 센서가 동일 시점에 수집한 데이터를 하나의 좌표계 안에서 일치시키고 각 센서 데이터에 일관된 라벨을 부여해야 합니다. 카메라가 제공하는 풍부한 시각 정보와 라이다가 제공하는 정밀한 3D 거리 정보를 결합하면 객체 분류와 위치 추정 정확도가 함께 향상됩니다. 센서 융합 라벨링은 단일 센서 라벨링보다 복잡한 작업 구조를 요구하지만 날씨나 조명 변화 등 단일 센서의 한계를 보완하여 다양한 환경 조건에서도 안정적으로 작동하는 자율주행 모델 학습에 직접적으로 기여합니다.
자율주행 모델이 실제 도로 환경에서 안정적으로 동작하려면 학습 데이터가 다양한 조건을 균형 있게 포함해야 합니다. 낮·밤·안개·비·눈 등 기상 조건과 도심·고속도로·이면도로 등 도로 유형 그리고 보행자 밀도가 높은 횡단보도나 복잡한 교차로 상황까지 데이터셋 안에 고루 반영되어야 합니다. 특정 환경 조건에만 편중된 학습 데이터는 모델이 익숙하지 않은 환경에서 인식 성능이 급격히 떨어지는 원인이 됩니다. 자율주행 영상 데이터 라벨링 운영의 목표는 많은 양의 데이터를 생산하는 것만이 아니라 모델이 다양한 실제 주행 상황에 대응할 수 있도록 조건의 폭과 품질을 동시에 갖춘 학습 데이터를 구성하는 것입니다.



.svg)
.svg)


